Advantages:
- The technology enhances user experience with its intuitive control reference frame.
- Users can minimize physical effort in manipulating the robotic arm through hybrid inverse kinematics.
- The intuitive control reference frame fosters a natural and user-friendly interaction between humans and robots.
Business Summary:
The Intuitive Robotic Arm Control Reference Frame with a Hybrid Inverse Kinematics system is a groundbreaking technology that offers a more natural and user-friendly human-robot interface. By comparing conventional control reference frames (Ground and End-effector) with our novel Intuitive control reference frame, the technology has demonstrated superior performance. Through tests conducted with human subjects using an activity of daily living (ADL) task, valuable qualitative and quantitative data were collected to evaluate the three control reference frame systems. The results clearly indicate that the Intuitive robotic arm control reference frame with the hybrid inverse kinematics significantly reduces the effort required to manipulate the robotic arm. It provides users with a highly intuitive way to maneuver the arm, surpassing the limitations of conventional reference frames. With its potential applications in various industries requiring precise and intuitive robotic arm control, this technology holds great promise for revolutionizing the field of human-robot interaction.
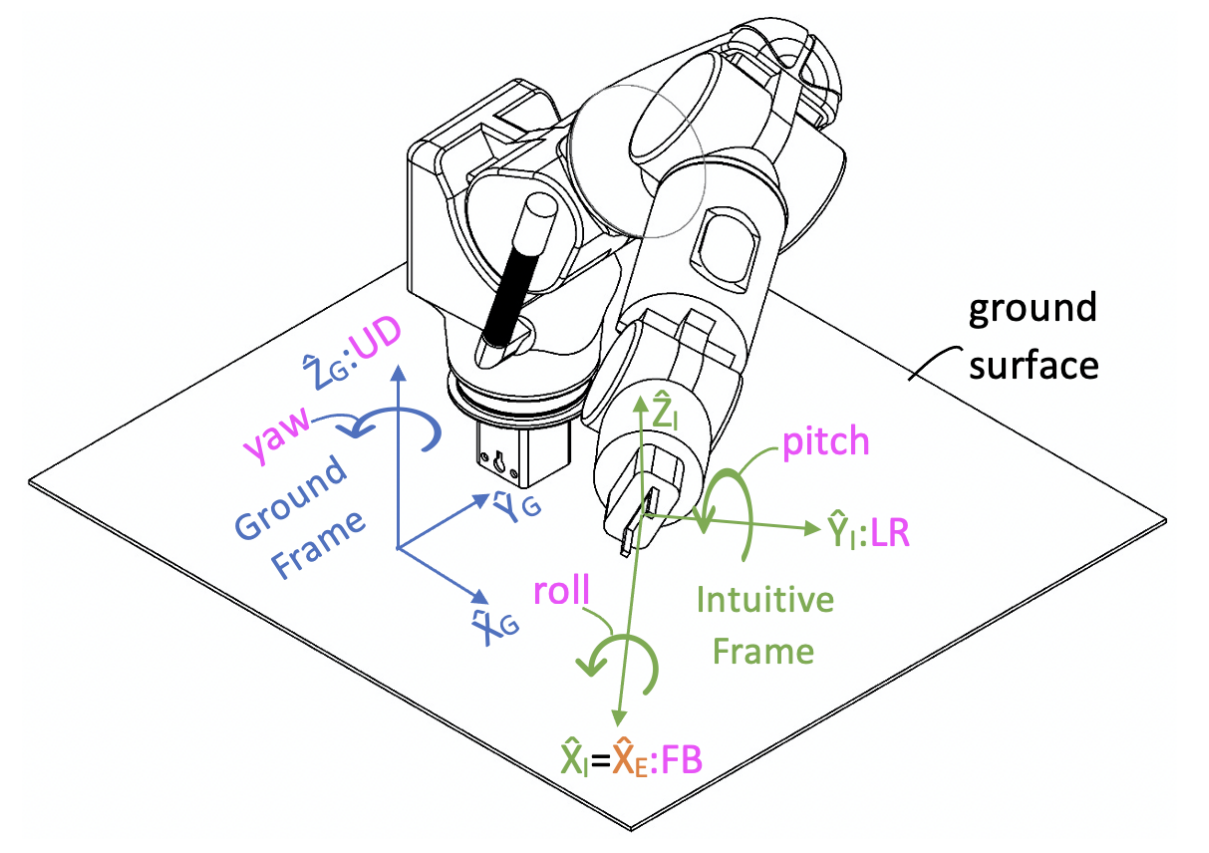
Illustration of the Intuitive Reference Frame and the mapped 6 DOF user control vectors.
Desired Partnerships:
- License
- Sponsored Research
- Co-Development