Competitive Advantages
- Integrated camera, proximity and eight force sensors
- Wi-Fi, Bluetooth, Ethernet and USB connectivity
- Software library for customization
Summary
Researchers at USF have developed a gripper that is customizable for multiple applications as it can handle various object shapes with controllable pressure at a fraction of the cost of currently available commercial units. This technology will empower individuals to utilize robotic grippers in a wider array of applications. It uses readily available cross-platform software interfaces which will enable users to control the grip, acquire sensory information and produce a live camera video feed without any additional programming. This technology alleviates the need for generous budgets and technical knowledge in order to acquire, implement and operate a robotic gripper.
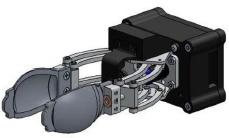
A Robotic End Effector and Sensor Package for Use on Robotic Manipulators
Desired Partnerships
- License
- Sponsored Research
- Co-Development