Advantages:
- Enhanced Flexibility and Adaptability
- Optimized Resource Utilization Predictively
- Decentralized, Scalable Performance
Summary:
In smart factories, where autonomous mobile robots (AMRs) interact dynamically with changing tasks and other robots, this research provides a revolutionary method for maximizing mobility. The proposed multi-agent reinforcement learning allows AMRs to predictively navigate with collision avoidant paths. Meanwhile, the AMRs resolve the inevitable collisions in a self-organized way. The AMR system quickly achieves near-optimal performance through cooperative path planning and collision resolution, demonstrating scalability with the number of robots. This study offers potential ideas for boosting productivity in smart manufacturing operations and makes significant contributions to the domains of multi-robot systems, intelligent transportation systems, and decentralized multi-agent reinforcement learning.
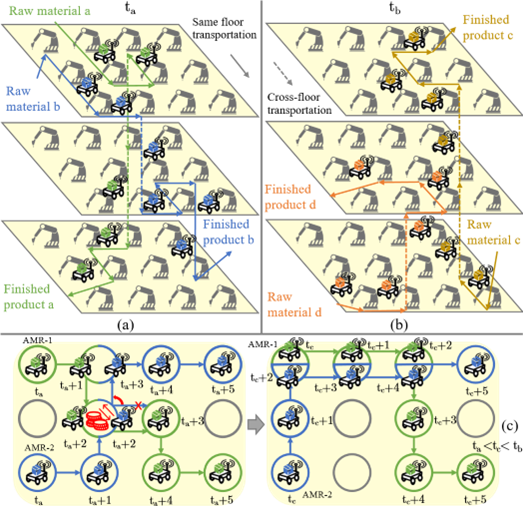
The smart factory transportation is formulated as multi-AMR discrete navigation in a multi-floor model
Desired Partnerships:
- License
- Sponsored Research
- Co-Development